4 Ordonnancement temps réel
4.1 Caractéristiques de l'ordonnancement temps réel
4.2 Les algorithmes d'ordonnancement temps réel
4.2.1 Classification des algorithmes d'ordonnancement temps réel
4.2.2 Modélisation de l'application temps réel pour la certification
- les tâches périodiques : Elles correspondent aux mesures sur le procédé ; elles se réveillent régulièrement (toutes les P unités de temps)
- les tâches apériodiques : Elles correspondent aux événements ; elles se réveillent de manière aléatoire
Les tâches périodiques
On distingue :
Une tâche périodique Tp (r0, C, R, P) est caractérisée par les paramètres temporels suivants avec 0 ???C ?????R ????P :
Une tâche périodique relative n'a pas de paramètre R défini. Une tâche périodique à échéance sur requête est une tâche pour
laquelle R = P.
- périodiques strictes : contraintes temporelles dures à respecter absolument
- périodiques relatives : contraintes temporelles molles qui peuvent être non respectées de temps à autre (sans échéance)
- périodiques à échéance sur requête (délai critique = période)
- r0, sa date de premier réveil
- P, sa période
- rk, la date de réveil de la kème requête, rk = r0 + kP
- C, son temps d'exécution maximum
- R, son délai critique et dk, sa date d'échéance qui est telle que échéance d = rk + R
- C(t) : le temps d'exécution restant à t
- R(t) : le délai critique dynamique c'est-à dire le temps restant à t jusqu'à d.
 |
|
|
Fig 11 : Modèle de tâche périodique
|
|
|
|
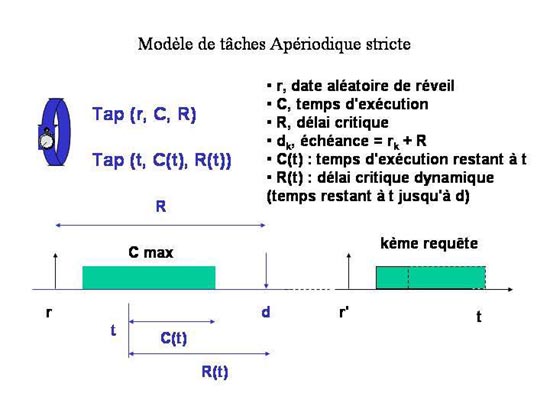
Les tâches apériodiques
On distingue :
Une tâche apériodique Tap (r0, C, R) est caractérisée par les paramètres temporels suivants avec 0 ???C ????R :
Une tâche apériodique relative n'a pas de paramètre R défini.
- apériodiques strictes : contraintes temporelles dures à respecter absolument
- apériodiques relatives : contraintes temporelles molles qui peuvent être non respectées de temps à autre (sans échéance)
- r, sa date de réveil
- C, son temps d'exécution maximum
- R, son délai critique et dk, sa date d'échéance qui est telle que échéance d = rk + R
- C(t) : le temps d'exécution restant à t
- R(t) : le délai critique dynamique c'est-à dire le temps restant à t jusqu'à d.
 |
|
|
Fig 12 : Modèle de tâche apériodique
|
|
|
|
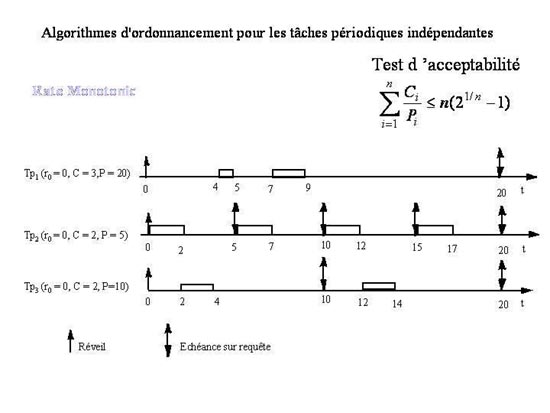
4.2.3 Ordonnancement en ligne préemptifs pour des tâches périodiques indépendantes.
L'ordonnancement Rate Monotonic (RM)
 |
|
|
Fig 13 : Ordonnancement Rate Monotonic
|
|
|
|
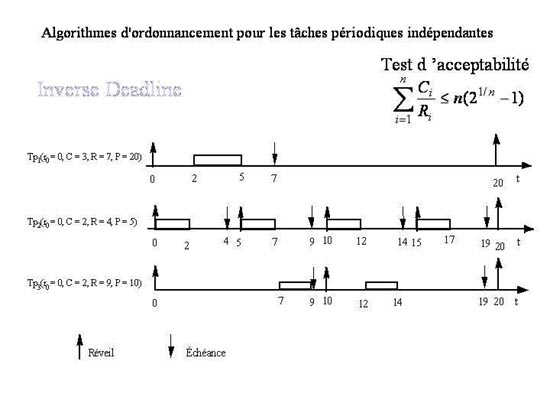
Ordonnancement Inverse Deadline (ID)
 |
|
|
Fig 14 : Ordonnancement Inverse Deadline
|
|
|
|
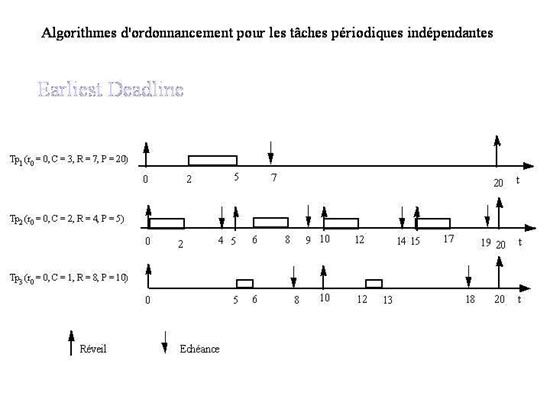
Ordonnancement Earliest Deadline (EDF)
 |
|
|
Fig 15 : Ordonnancement Earliest Deadline
|
|
|
|