5 Une application temps réel sous RT-Linux
Le système RT-Linux est une extension du système Linux classique vers le temps réel. Il est constitué par un noyau temps réel
Rt-Linux qui partage le processeur avec le noyau de base Linux et exécute des tâches temps réel.
5.1 Les tâches RT-Linux.
5.1.1 Mise en œuvre.
- Elles partagent le même espace adresse.
- Comme elles sont dans l'espace adresse du noyau, on élimine la charge occasionnée par tout changement de niveau de protection.
- Un avantage plus pratique que performant. Dans l'espace adresse du noyau, il est permis de faire référence aux objets et aux fonctions par leur nom plutôt que par leur descripteur. C'est l'édition de lien dynamique des "modules chargeables" qui résoudra les symboles en adresse.
- int *stack ; /* hardcoded */
- int uses_fp ; /* this one is too*/
- int magic ;
- int state; Etat de la tâche : RT_TASK_READY,...
- int *stack_bottom ; Pointeur de pile.
- int priority ; Politique d' ordonnancement basée sur la priorité seule.
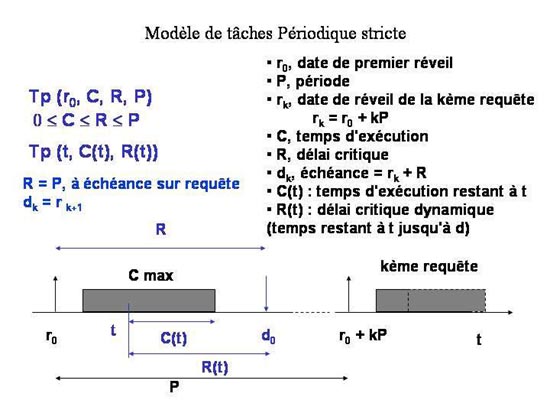
- RTIME period; P : Période si la tâche est périodique.
- RTIME resume_time; r : Prochaine heure de réveil .
- struct rt_task_struct *next; Chaînage simple de l'ensemble des tâches créées dans l'application.
- RTL_FPU_CONTEXT fpu_regs ;
- int rt_task_init (RT_TASK *task, void (fn)(int data), int data, int stack_size, int priority) : Création d'une tâche RT_Linux pointée par "task". Il y a réservation d'espace mémoire dans le noyau (kmalloc) à hauteur de stack_size. "fn" est le code exécuté par la tâche. "data" est le paramètre passé à "fn" au démarrage. "priority" est la priorité de la tâche dont la valeur peut aller de 1, la plus forte priorité, à "RT_LOWEST_PRIORITY" (1000000), la plus faible.
- int rt_task_delete (RT_TASK *task) : Suppression logique d'une tâche : Pas de libération de l'espace mémoire "kfree" à ce niveau. Son état passe à RT_TASK_ZOMBIE.
- int rtl_delete_zombies (void) : Suppression réelle de l'ensemble des tâches logiquement supprimées par "rt_task_delete". "kfree" est effectué ici.
- int rt_task_make_periodic (RT_TASK *task, RTIME start_time, RTIME period) : Rend la tâche "*task" périodique avec une période "period" à partir de la première date de réveil "start_time".
- int rt_task_wait (void) : Suspension de la tâche périodique jusqu'à sa prochaine date de réveil. Elle met la tâche qui l'a appelée dans l'état RT_TASK_DELAYED. En général toute tâche périodique indique par cette fonction qu'elle a terminé son traitement : ce doit donc être la dernière instruction du code de la tâche. Les tâches apériodiques ne s'en servent pas car l'état RT_TASK_DELAYED ne leur correspond pas.
- int rt_task_wakeup (RT_TASK *task) : Déclenche la tâche "task", c'est-à-dire la met dans l'état prêt RT_TASK_READY.
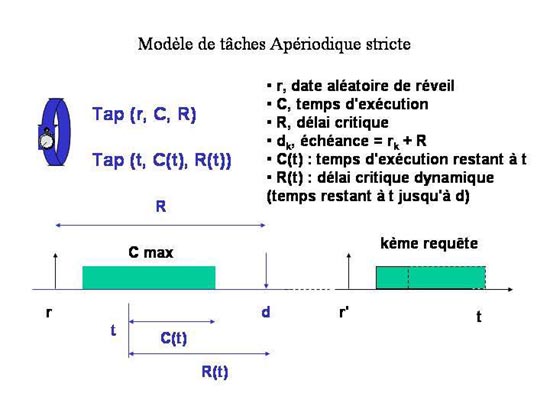
- int rt_task_suspend (RT_TASK *task) : Inactive la tâche "task", c'est-à-dire la met dans l'état RT_TASK_DORMANT. En général, cette routine est utilisée par les tâches apériodiques à la place de rt_task_wait pour signaler la fin de leur traitement. Une tâche périodique ou apériodique peut être suspendue par une autre tâche ou par l' ordonnanceur .
 |
|
|
Tâches périodiques.
|
|
|
|
 |
|
|
Tâches apériodiques.
|
|
|
|
5.1.2 Format d'une application.
#define MODULE
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/version.h>
#include <linux/errno.h>
#include <rtl_sched.h >
#include <linux/arch/i386/kernel/irq.h>
#define NTASKS 2
RT_TASK tasks[NTASKS]
|
Fonction 1
void f_tâche_1(int par1)
|
5.2 L'ordonnancement.
Dans la version 1.2 de RT-Linux, présentée sur le site officiel du système, trois
ordonnanceur
s préemptifs ont déjà été installés :
- Un ordonnanceur "à priorité fixe" : il s'appuie sur le paramètre "priority" défini au niveau de chacune des tâches. Lorsque plusieurs tâches sont prêtes, celle qui a la priorité la plus forte (la valeur la plus petite) est élue. Une tâche qui se réveille (RT_TASK_READY) pourra préempter la tâche active si sa priorité est plus forte.
- Un ordonnanceur "Rate-Monotonic" : nous ne nous y intéresserons pas, compte-tenu des limites de cette politique vis-à-vis des tâches apériodiques.
- Un ordonnanceur "EDF" ("Earliest Deadline First") : Il utilise l'urgence comme critère de sélection de la prochaine tâche à élire.